Platform over civiele techniek, ondergrondse infra, energie, bouwmaterieel & bouwmachines
Op 26 maart 2019 is de dag van de puntenwolk. We staan dan uitvoerig stil bij het inwinnen, verwerken en extraheren van informatie uit puntenwolken. Multidisciplinair bureau GeoNext spreekt op deze dag over het werken met puntenwolken. In aanloop naar het evenement hebben wij directeur Nico Schaefers de volgende vragen voorgelegd: Hoe kom je van een puntenwolk tot de informatie die je nodig hebt? Wat is de kwaliteit van de diverse inwinmethodes en hoe borg je de kwaliteit bij projecten?
Hoe kom je van een puntenwolk tot de informatie die je nodig hebt?
“Voordat je überhaupt iets met puntenwolken wil gaan doen, moet je nadenken over een aantal onderwerpen, zoals: welk product wil de klant en met welke geometrische nauwkeurigheid, is de gevraagde informatie uit een puntenwolk te halen en welke inwinmethode is geschikt? GeoNext meet bijvoorbeeld veel spoorwegen in: spoorstaven, bovenleiding en alle objecten. De keus om te gaan scannen is in eerste instantie gebaseerd op de veiligheid. Je mag de spoorbaan niet zonder meer betreden, dus laserscanning is dan logisch om niet in een treinvrije periode (bijna altijd dus in de nacht) te hoeven meten. Een nadeel van laserscanning is dat lassen (m.u.v. ES-lassen) in de spoorstaven niet of nauwelijks in de puntenwolk zichtbaar zijn. Daarom meten wij de lassen traditioneel in.“
Wat is de kwaliteit van de diverse inwinmethodes?
“Tegenwoordig zijn er meerdere methodes om puntenwolken in te winnen. Deze zijn in twee grote groepen te onderscheiden: meten met camera’s (foto of video) en met laserscanners. Bij opname middels een fotocamera of videocamera wordt het onderwerp geprojecteerd op een lichtgevoelige sensor. Deze vangt het gereflecteerde licht op, vergelijkbaar met een menselijk oog. Het geprojecteerde beeld is op een vlak, dus is er geen diepte informatie aanwezig. Door vanuit twee verschillende standplaatsen foto’s te maken (stereofotografie), kan een 3D-beeld berekend worden. Door ingewikkelde rekentechnieken (aero triangulatie, zoeken van identieke punten, dense matching) berekent de software in de overlap tussen foto’s 3D coördinaten en dus een puntenwolk.
De kwaliteit van dit proces is dus zeer afhankelijk van:
Neem bijvoorbeeld een foto, gemaakt met je smartphone: ook al heeft die een grote resolutie, de sensor is klein en daarom weinig lichtgevoelig en met een klein dynamisch bereik, de lens is goedkoop en onderhevig aan beeldvervorming. Fotografeer je met een middelformaat camera met een sensor van 5,3x4cm (€ 80.000,=) dan krijg je een heel ander resultaat. Wil je vanuit een drone veel detail zien, dan is een telelens noodzakelijk (100mm), maar dan heb je minder scherptediepte. Al deze aspecten bepalen je opnamekwaliteit en uiteindelijk het resultaat van je puntenwolk.
Opname met een laserscanner is gebaseerd op afstandsmeting. De scanner zendt een laserpuls. Deze wordt door het object weerkaatst en door de sensor weer opgevangen. Uit het tijdsverschil tussen zenden en ontvangen (of het faseverschil, bij fasescanners) wordt de afstand berekend, de positie van de scan kop bepaalt de horizontale en verticale hoek. Net als bij een tachymeter wordt hiermee de 3D coördinaten van de gemeten punten bepaald. Bij dynamisch scannen is een GNSS/INS navigatiesysteem van belang voor de absolute positie. De kwaliteit van al deze sensoren bepalen de uiteindelijke relatieve kwaliteit van je puntenwolk. De kosten van laserscanners varieert van enkele tienduizenden euro’s voor een instapmodel tot meer dan een half miljoen voor een uitgebreid mobile mapping systeem. Tot slot dient de ingewonnen puntenwolk nog aangesloten te worden op het RD- en NAP-netwerk. Maak van te voren een plan waarin je bepaalt waar je de targets plaats en welke targets je gebruikt.
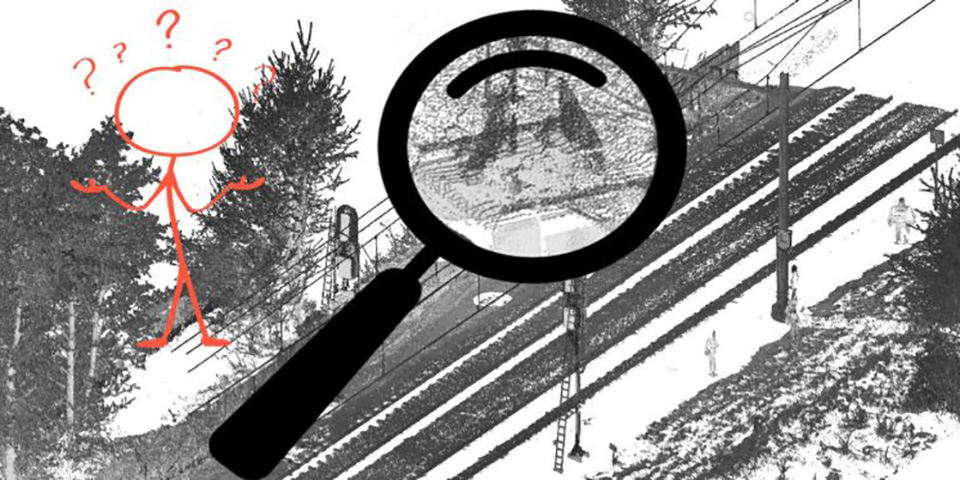
De meeste CAD-pakketten zijn in staat om puntenwolken in te lezen, zodat hieruit geometrie bepaald (gemodelleerd) kan worden. Dit vraagt veel routine. De eerste stap is de puntenwolken zodanig op te knippen dat het werkbaar is in je CAD-systeem. De tweede stap is het identificeren van een object . Op een afstandje zie je wat het is, bij nader inzoomen wordt het moeilijker (zie foto). Beschikt je CAD-pakket over allemaal hulpmiddelen, bijvoorbeeld om dwarsdoorsnedes te maken, dan zal dit het modelleren zeker helpen. Mooier is het natuurlijk om automatisch te laten modelleren, dit is momenteel sterk in ontwikkeling. In de nieuwste versie van Trimble Business Center (5.0) zitten al wat tools om lantaarnpalen of bomen te modelleren.”
Hoe borg je de kwaliteit bij projecten?
“Het bedienen van een laserscanner is het punt niet. De uitdaging zit in het aansluiten op de Primaire Meetkundige Grondslag (PMG), het aantoonbaar maken van de behaalde kwaliteit, en het efficiënt extraheren van de gewenste informatie. Met name dynamisch laserscannen op hoge nauwkeurigheid onder wisselende GNSS omstandigheden is erg complex. Wij hebben door het pad van de 100 valkuilen te bewandelen de afgelopen jaren hierover heel veel geleerd. Landmeten met theodoliet, afstandsmeting en waterpassen doen we al meer dan 100 jaar, laserscannen is relatief nieuw. Je zult het proces en de workflow goed onder de knie moeten krijgen voor een mooi resultaat. “
De dag van de puntenwolk – 26 maart
Professionals en specialisten van verschillende fabrikanten zijn aanwezig om kennis en ervaring te delen. Lennart Querelle van GeoNext geeft een presentatie over 3D-scanning en het verwerken van een puntenwolk naar een BIM-model in REVIT. Meer informatie over de dag van puntenwolk, vindt u hier.
De dag van de puntenwolk is een onderdeel van Landmeten 2.0.
Louwers Mediagroep
Schatbeurderlaan 6
6002 ED Weert



